Introduction#
The Problem#
import numpy as np
import matplotlib.pyplot as plt
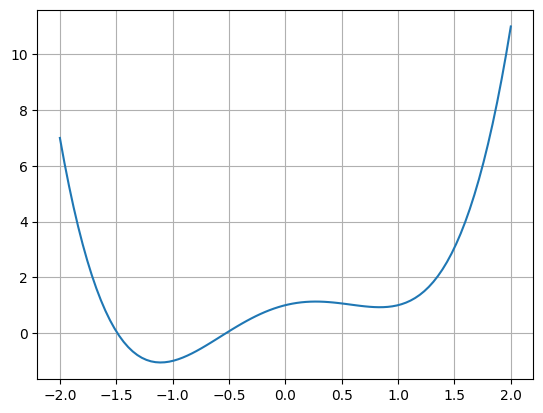
Define and plot our test function:
def f1D(x):
return x**4.0 - 2.0*x**2.0 + x + 1.0
plt.figure(1)
plt.grid()
x = np.linspace(-2, 2, 100)
plt.plot(x, f1D(x))
plt.show()
The Gradient Descent Algorithm#

def f1D(x):
return x**4.0 - 2.0*x**2.0 + x + 1.0
def df1D(x):
''' defines the derivative of f1D(x)'''
return 4.0*x**3.0 - 4.0*x + 1
plt.figure(1)
plt.grid()
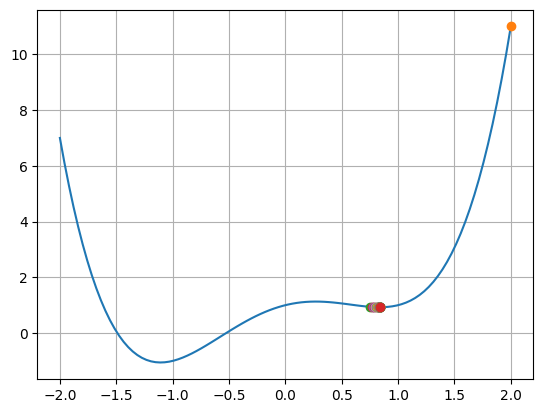
plt.plot(x, f1D(x))
# parameters for the algorithm
x0 = 2.0
gam = 0.05
prec = 0.000001
maxIter = 1000
# gradient descent iteration
for i in range(0, maxIter):
plt.plot(x0, f1D(x0), 'o')
x1 = x0 - gam * df1D(x0)
# check for convergence
if(abs(x0 - x1) <= prec):
break
else:
x0 = x1
print(" Iterations:", i)
print(" x0:", x1)
plt.show()
Iterations: 42
x0: 0.8375622023349097
The Conjugate Gradient Algorithm#


See also: https://en.wikipedia.org/wiki/Conjugate_gradient_method
SciPy’s optimize package#
And specifically SciPy’s minimize() function
import scipy.optimize as optimize
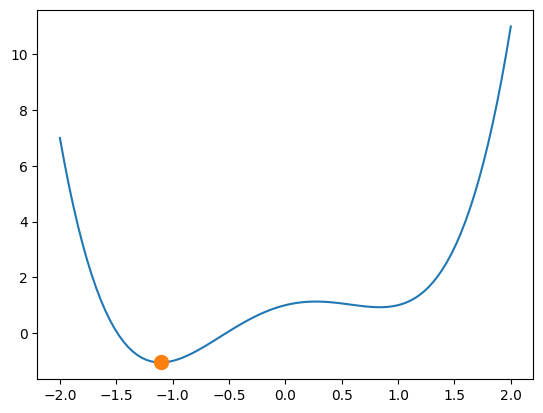
sol = optimize.minimize(fun=f1D, x0=-2, method='CG')
print( sol )
message: Optimization terminated successfully.
success: True
status: 0
fun: -1.056172885244464
x: [-1.107e+00]
nit: 1
jac: [ 5.960e-08]
nfev: 12
njev: 6
Plot the result:
plt.figure(1)
plt.plot(x, f1D(x))
plt.plot(sol.x, sol.fun, 'o', markersize=10)
plt.show()
Note
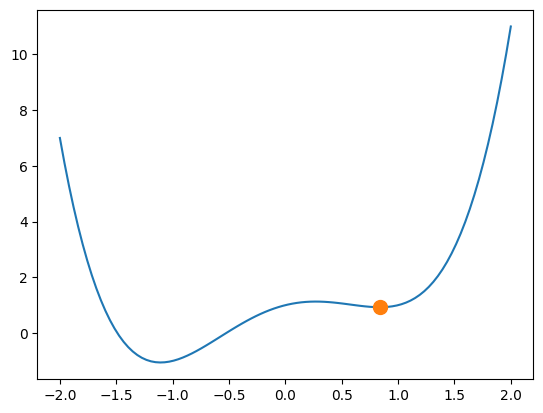
The conjugate gradient method strongly depends on the starting point!
sol = optimize.minimize(fun=f1D, x0=0.5, method='CG')
print( sol )
# and plot it
plt.figure(1)
plt.plot(x, f1D(x))
plt.plot(sol.x, sol.fun, 'o', markersize=10)
plt.show()
message: Optimization terminated successfully.
success: True
status: 0
fun: 0.9266582180811516
x: [ 8.376e-01]
nit: 2
jac: [-8.941e-08]
nfev: 12
njev: 6
Further methods#
SciPy allows for the following optimization methods:
Nelder-Mead, Powell, CG, BFGS, Newton-CG, L-BFGS-B, TNC, COBYLA, SLSQP, trust-constr, dogleg, trust-ncg, trust-exact, trust-krylov
See
https://docs.scipy.org/doc/scipy/reference/generated/scipy.optimize.minimize.html
https://en.wikipedia.org/wiki/List_of_algorithms#Optimization_algorithms
for details on all of them.
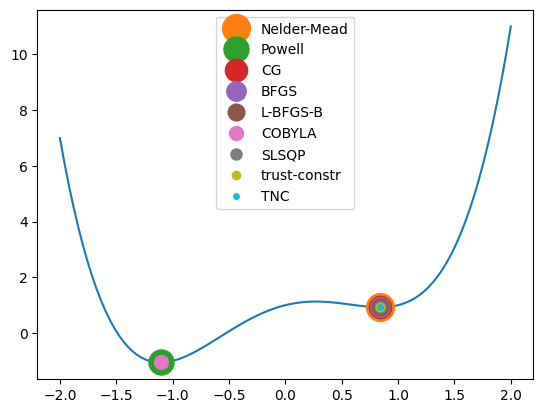
Let’s test those which just need x0:
algorithms = ['Nelder-Mead', 'Powell', 'CG', 'BFGS',
'L-BFGS-B', 'COBYLA', 'SLSQP', 'trust-constr',
'TNC']
plt.figure(1)
plt.plot(x, f1D(x))
for i in range(0, len(algorithms)):
sol = optimize.minimize(fun=f1D, x0=0.5,
method=algorithms[i])
plt.plot(sol.x, sol.fun, 'o', markersize=20-i*2,
label=algorithms[i])
plt.legend()
plt.show()
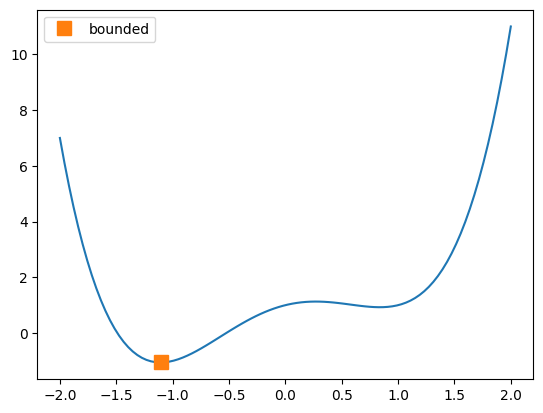
Using bounds instead of \(x_0\)#
plt.figure(1)
plt.plot(x, f1D(x))
sol = optimize.minimize_scalar(fun=f1D, method='bounded',
bounds=(-2, 2))
plt.plot(sol.x, sol.fun, 's', markersize=10, label='bounded')
plt.legend()
plt.show()
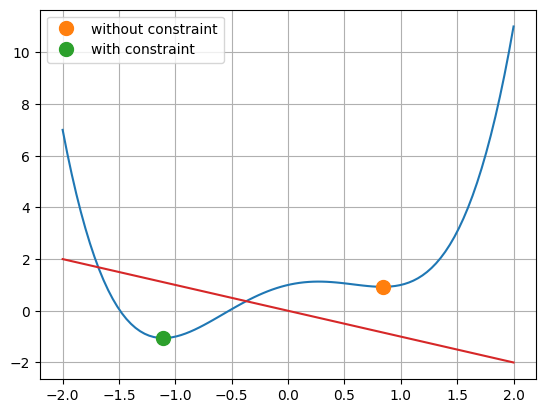
The Full Problem: Including Constraints#
Define an inqeualtity constraint function g1(x) and use it as an inequality constraint using a list of dictonaries:
def g1(x):
return -x
cons = [{'type': 'ineq',
'fun' : g1}]
sol = optimize.minimize(fun=f1D, x0=0.5, method='SLSQP')
solCons = optimize.minimize(fun=f1D, x0=0.5, method='SLSQP',
constraints=cons)
plt.figure(1)
plt.grid()
plt.plot(x, f1D(x))
plt.plot(sol.x, sol.fun, 'o', markersize=10,
label='without constraint')
plt.plot(solCons.x, solCons.fun, 'o', markersize=10,
label='with constraint')
plt.plot(x, g1(x))
plt.legend()
plt.show()
print(solCons)
message: Optimization terminated successfully
success: True
status: 0
fun: -1.056172491482517
x: [-1.107e+00]
nit: 5
jac: [ 2.904e-03]
nfev: 14
njev: 5
multipliers: [ 0.000e+00]
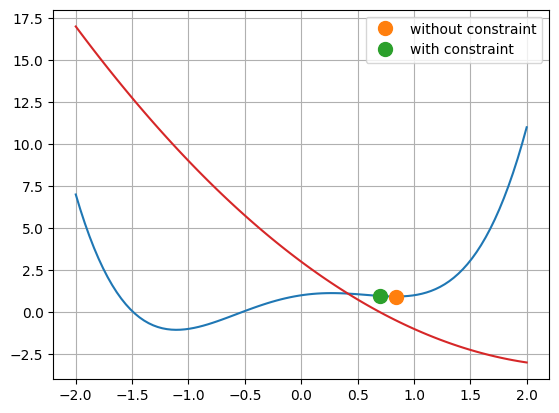
Define an equaltity constraint function h1(x) and use it as an equality constraint using a list of dictonaries:
def h1(x):
return x**2-5*x+3
cons = [{'type': 'eq',
'fun' : h1}]
sol = optimize.minimize(fun=f1D, x0=0.5, method='SLSQP')
print( sol )
print("---------")
solCons = optimize.minimize(fun=f1D, x0=0.5, method='SLSQP',
constraints=cons)
print( solCons )
# and plot it
plt.figure(1)
plt.grid()
plt.plot(x, f1D(x))
plt.plot(sol.x, sol.fun, 'o', markersize=10,
label='without constraint')
plt.plot(solCons.x, solCons.fun, 'o', markersize=10,
label='with constraint')
plt.plot(x, h1(x))
plt.legend()
plt.show()
message: Optimization terminated successfully
success: True
status: 0
fun: 0.9266583174268408
x: [ 8.378e-01]
nit: 5
jac: [ 9.373e-04]
nfev: 11
njev: 5
multipliers: []
---------
message: Optimization terminated successfully
success: True
status: 0
fun: 0.9612951551301436
x: [ 6.972e-01]
nit: 4
jac: [-4.332e-01]
nfev: 8
njev: 4
multipliers: [ 1.201e-01]
The Full Mutli-Dimensional Problem#
a) 2D example 1#
Note
See Matplotlib Plotting for 3D data plotting.
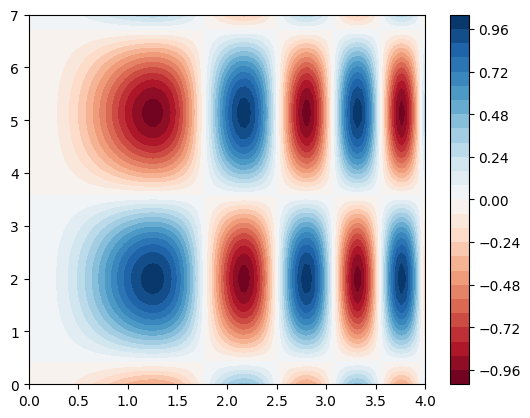
def f2D(x):
return np.sin(x[0]**2) * np.cos(x[1]-2)
x = np.linspace(0, 4.0, 100)
y = np.linspace(0, 7.0, 100)
X, Y = np.meshgrid(x, y)
Z = f2D([X, Y])
plt.figure(1)
plt.contourf(x, y, Z, cmap='RdBu', levels=30)
plt.colorbar()
plt.show()
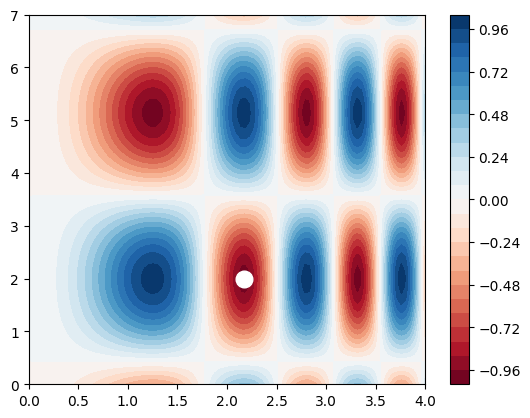
Find “a” minimum in the x/y plane starting from x0 = [2, 3]:
sol = optimize.minimize(fun=f2D, x0=[2, 3])
print( sol )
plt.figure(1)
plt.contourf(x, y, Z, cmap='RdBu', levels=30)
plt.plot(sol.x[0], sol.x[1],
marker='o', markersize=12, color='w' )
plt.colorbar()
plt.show()
message: Optimization terminated successfully.
success: True
status: 0
fun: -0.9999999999999997
x: [ 2.171e+00 2.000e+00]
nit: 7
jac: [ 2.980e-08 1.490e-08]
hess_inv: [[ 5.322e-02 4.948e-04]
[ 4.948e-04 1.002e+00]]
nfev: 27
njev: 9
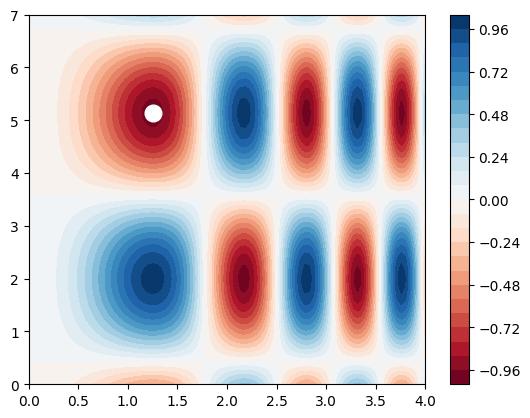
Find “a” minimum in the x/y plane starting from x0 = [2, 5]:
sol = optimize.minimize(fun=f2D, x0=[2, 5])
print( sol )
plt.figure(1)
plt.contourf(x, y, Z, cmap='RdBu', levels=30)
plt.plot(sol.x[0], sol.x[1],
marker='o', markersize=12, color='w' )
plt.colorbar()
plt.show()
message: Optimization terminated successfully.
success: True
status: 0
fun: -0.9999999999998982
x: [ 1.253e+00 5.142e+00]
nit: 7
jac: [ 1.177e-06 2.980e-08]
hess_inv: [[ 1.652e-01 1.122e-03]
[ 1.122e-03 1.000e+00]]
nfev: 24
njev: 8
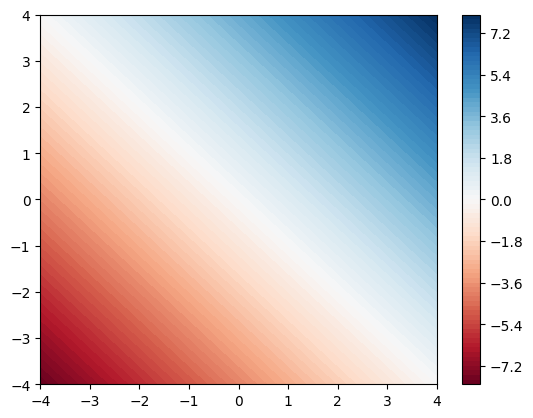
b) 2D example 2#
Hint
Be careful, sometimes the computer is not quite right …
def f2D(x):
return x[0]+x[1]
sol = optimize.minimize(fun=f2D, x0=[0, 0])
print( sol )
x = np.linspace(-4, 4.0, 100)
y = np.linspace(-4, 4.0, 100)
X, Y = np.meshgrid(x, y)
Z = f2D([X, Y])
plt.figure(1)
plt.contourf(x, y, Z, levels=100, cmap='RdBu')
plt.colorbar()
plt.show()
message: Optimization terminated successfully.
success: True
status: 0
fun: -258170828.6299674
x: [-1.291e+08 -1.291e+08]
nit: 2
jac: [ 0.000e+00 0.000e+00]
hess_inv: [[ 5.348e+08 5.348e+08]
[ 5.348e+08 5.348e+08]]
nfev: 363
njev: 121
c) 3D example 1#
def f3D(x):
return np.sin(x[0]**2 - x[1]) * np.cos(x[2])
sol = optimize.minimize(fun=f3D, x0=[0, 0, 0])
print( sol )
message: Optimization terminated successfully.
success: True
status: 0
fun: -1.0
x: [-7.043e-09 1.571e+00 -7.858e-09]
nit: 4
jac: [ 0.000e+00 0.000e+00 0.000e+00]
hess_inv: [[ 1.000e+00 7.139e-10 4.550e-16]
[ 7.139e-10 1.000e+00 -7.139e-10]
[ 4.550e-16 -7.139e-10 1.000e+00]]
nfev: 24
njev: 6
Note
Remember: more than one (local) minum might exist.
sol = optimize.minimize(fun=f3D, x0=[5, 5, 5])
print( sol )
message: Optimization terminated successfully.
success: True
status: 0
fun: -0.9999999999998955
x: [ 4.718e+00 4.983e+00 6.283e+00]
nit: 9
jac: [ 3.465e-06 -2.831e-07 -3.353e-07]
hess_inv: [[ 2.238e-02 1.034e-01 -6.687e-03]
[ 1.034e-01 9.901e-01 -3.410e-02]
[-6.687e-03 -3.410e-02 1.028e+00]]
nfev: 60
njev: 15
d) 3D example 2: With Constraints#
def f3D(x):
return np.sin(x[0]**2 - x[1]) * np.cos(x[2])
# and a inequaltiy constraint
# ... i.e. g1(x) >= 0
def g1(x):
return 1 - x[0]**2 - x[1]**2 - x[2]**2
cons = [{'type': 'ineq',
'fun': g1}]
sol = optimize.minimize(fun=f3D, x0=[0, 0,0],
method='SLSQP', constraints=cons)
print( sol )
print('---------')
print( ' g1(x):', g1(sol.x) )
message: Optimization terminated successfully
success: True
status: 0
fun: -0.8414709848078964
x: [-1.490e-08 1.000e+00 0.000e+00]
nit: 2
jac: [-7.451e-09 -5.403e-01 7.451e-09]
nfev: 8
njev: 2
multipliers: [ 2.702e-01]
---------
g1(x): -2.220446049250313e-16